
The REXASI-PRO project paper addressing the robustness of the wheelchair-drone perception system has been finally published and made available online through the Springer digital library. The paper addresses the research and experimentation performed at IDSIA Autonomous Robotics lab by the TAS research group.
Please find below the abstract, keywords, and citation information.
Abstract:
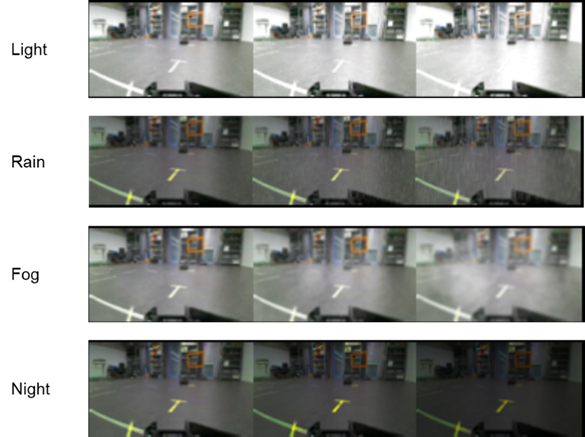
Safe road crossing by autonomous wheelchairs can be affected by several environmental factors such as adverse weather condi-tions influencing the accuracy of sensors based on artificial vision. Pre-vious studies have addressed experimental evaluation of multi-sensor information fusion to support road-crossing decisions in autonomous wheelchairs. In this study, we focus on the experimental evaluation of its tracking performance against outdoor environmental factors such as fog, rain, darkness, etc. It is rather intuitive that those factors can neg-atively affect the tracking performance; therefore our aim is to quantify through a set of metrics how the performance of the single sensors and their information fusion changes when such external factors are present. This is a first step in designing warning strategies in a novel framework based on the MAPE-k feedback loop established for the sensor system. System reconfiguration to reduce the reputation of less accurate sensors can then be set, thus improving overall safety. The problem is analysed within the context of the European project REXASI-PRO which aims to design a trustworthy autonomous wheelchairs supported by drones in which security, safety, ethics, and explainability are entangled to improve autonomy for people with reduced mobility. Results have been achieved by using an available laboratory dataset realised for a simplified frame-work in a road-crossing scenario and by applying appropriate software filters to simulate different environmental conditions.
Keywords:
Artificial Vision · Simulation and Modeling · Vehicle Safety Systems · Swarm Systems · Machine Learning
Citation:
F. Corradini, C. Grigioni, A. Antonucci, J. Guzzi and F. Flammini: “Experimental Evaluation of Road-Crossing Decisions by Autonomous Wheelchairs against Environmental Factors“. In: Kocian, A., Milazzo, P., Henriques Martins, A.L., Nanni, M., Pappalardo, L. (eds) Intelligent Transport Systems. INTSYS 2024. Lecture Notes of the Institute for Computer Sciences, Social Informatics and Telecommunications Engineering, vol 608. Springer, Cham. https://doi.org/10.1007/978-3-031-86370-7_22
Leave a Reply