
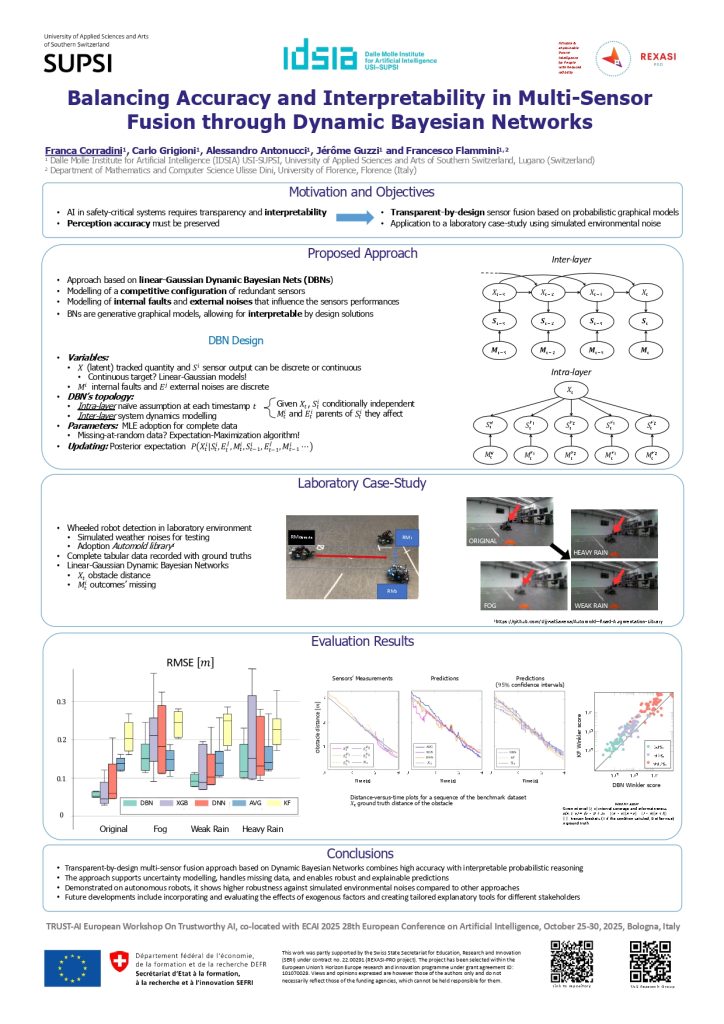
The work “Balancing Accuracy and Interpretability in Multi-Sensor Fusion through Dynamic Bayesian Networks” (F. Corradini, C. Grigioni, A. Antonucci, J. Guzzi, F. Flammini) was presented by PhD student Franca Corradini at the TRUST-AI workshop, co-located with the 28th European Conference on Artificial Intelligence (ECAI) 2025, which was held last week in Bologna (Italy).
The work addressed a transparent-by-design sensor fusion framework for perception in autonomous vehicles, based on Linear Gaussian Bayesian Networks, showing competitive performance compared to alternative approaches, as well as robustness under adverse environmental conditions.
The poster attracted significant interest from the audience, especially regarding the potential applications benefitting from model transparency, which is a critical factor in autonomous vehicle perception.
We are grateful to the TRUST-AI Workshop organisers and the whole ECAI community for the insightful feedback and networking opportunities.
Leave a Reply